Becsült olvasási idő: 4 perc
Több millió ipari robotot használnak világszerte az iparban és a becslések szerint a közeljövőben akár 500 ezer robot is bekerülhet a gyártósorokba évente. Ezek a robotoknak az energia- és költséghatékony üzemeltetése nemcsak cég szinten, hanem globálisan is fontos, hiszen a kevesebb energiával üzemeltetett robotok kevesebb ökológiai lábnyomot is hagynak maguk után. A Siemens specialistái két érdekes webinárt tartanak a témakörben a következő hetekben.
Robotkarok, manipulátorok
Az ipari robotok különböző karok, manipulátor egységek segítségével végzik el a feladatokat, legyen az hegesztés, az alkatrész áthelyezése egyik szállítószalagról a másikra, vagy akár egy minőségellenőrzésre használt, kamerával és egyéb érzékelőkkel felszerelt egység.
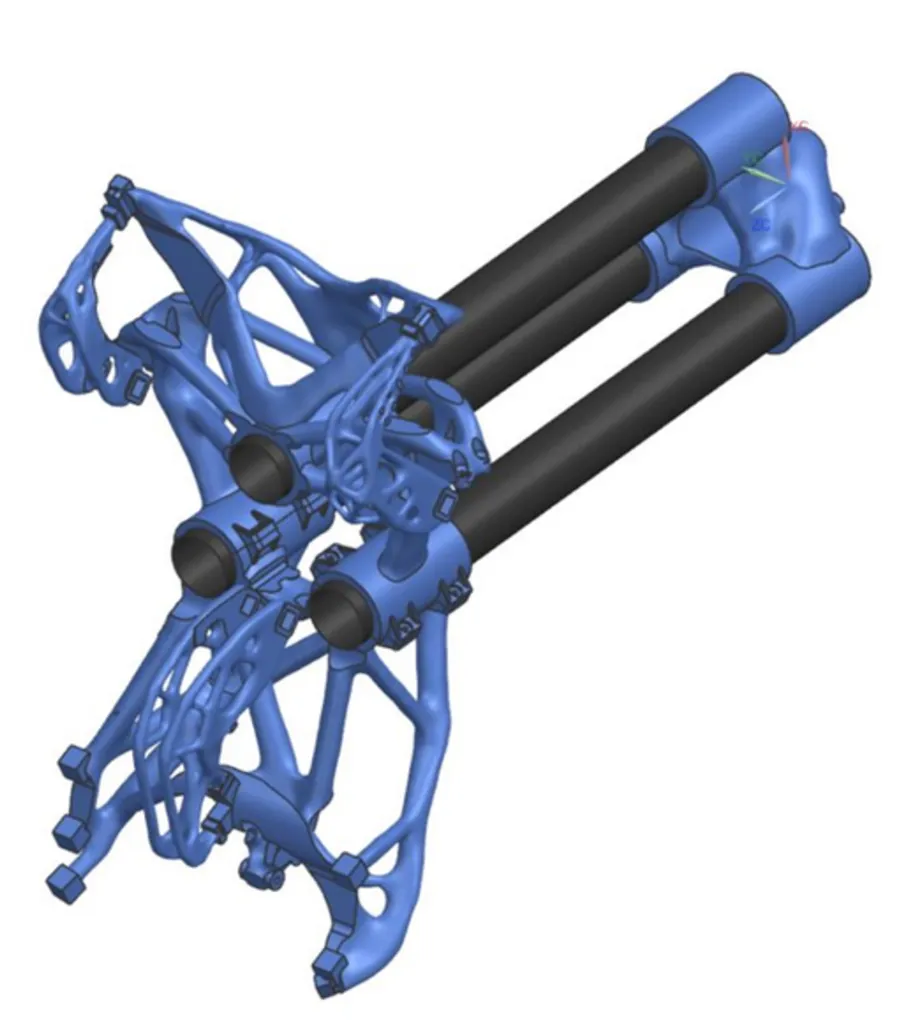
A hagyományosan felépített robot manipulátorok építő elemei nagyobb „tömbökből” állnak. Ezek általában nagyobb tömeggel rendelkeznek a megfelelő merevség biztosítása, vagy a gyorsabb, egyszerűbb gyárthatóság miatt. Ezért a robotok nagy extra tömeget mozgatnak, mely jelentős többlet energia felhasználást is igényel. Ezt a többlet energia felhasználást nemcsak financiálisan mérhetjük, hanem a környezetbe kikerülő többlet károsanyag kibocsájtással is.
Generatív Design, topológiai optimalizálás
A Siemens NX új topológiai optimalizálás modulja, kifejezetten azoknak készült, akik nem szimulációs mérnökök – ezért a kezelőfelülete könnyű és gördülékeny munkát tesz lehetővé – , illetve olyan optimalizált geometriákat akarnak létrehozni, melyeket elsősorban additív megmunkálással (pl.: 3D nyomtatással) lehet elkészíteni. Optimalizálni több feltétel szerint lehet: minimális tömeg, térfogat, vagy erőhatás.
Az NX topológiai optimalizálás moduljáról a következő két videóban látható egy rövid ismertető:
Webinárok a témakörben
Az első „The secret to sustainable manufacturing: Robot optimization through additive manufacturing” webináron a Siemens specialistái olyan megoldás mutatnak be a topológiai optimalizálás és az additív megmunkálás felhasználásával, mely a robotok manipulátorait tervezi újra, melynek köszönhetően:
- kisebb tömegű manipulátorok jönnek létre→ kevesebb tömeg mozgatása a robot által→ kisebb energia felhasználás,
- a hagyományos felépítéssel megegyező terhelhetőséget kapunk,
- gyorsabb az egység megmunkálása, rövidebb szállítási határidő,
- gyorsabb pótalkatrész elkészítés.
A robotkar optimalizálási webinár időpontja:
2024.06.20. csütörtök, 15:00
Kattintson ide és regisztráljon!
A második webináron – „Additive Manufacturing – Design to 3D Printing Brake Manifold” -a tervezéstől a 3D szkennelésen át a 3D fémnyomtatásig követhetjük egy alkatrész létrehozását.