A Plant Simulation régóta támogatja az AGV (Automated Guided Vehicle) modellezését, amihez érdemes ránézni egy korábbi cikkünkre „A szabadon mozgó AGV”.
Újabban az AGV-k ütközése, pontosabban fogalmazva az AGV-k közelség szabályozása került a középpontba, ehhez kapcsolódóan a következő cikkeink is tartalmaznak információt: „Megjelent a Plant Simulation 2201 (V17)” és „Plant Simulation 2201 (V17) újdonságok bővebben”.
Távolságzónák
A Plant Simulation 2201 az alábbi ábra szerinti két új érzékelő mezőt vagy távolságzónát biztosít a padlón szabadon mozgó transzporterek számára. A SimTalk metódus akkor hívódik meg, amikor egy másik transzporter belép a távolságzónába vagy elhagyja azt.
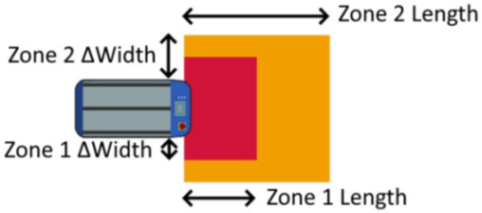
Ilyenkor az egyik tipikus művelet egy szállító megállítása egy másik mögött, amely egy rakodóhelyen várakozik, a másik pedig a szállító sebességének csökkentése kétirányú forgalmi helyzetben.

Ebben a cikkünkben egy gyakorlati példán keresztül mutatjuk be hogyan lehet az AGV-k ütközését elkerülni, illetve hogyan használható a Transporter objektum Distance control lehetősége.
Modell felépítése
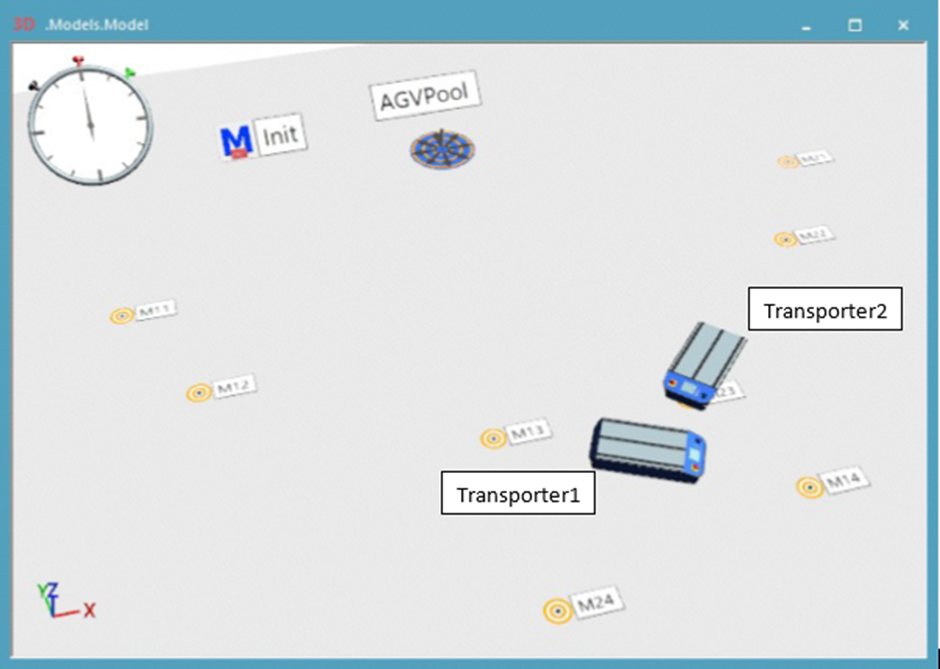
A kész modell az alábbi ábrán látható.

A modellépítés folyamata a következő:
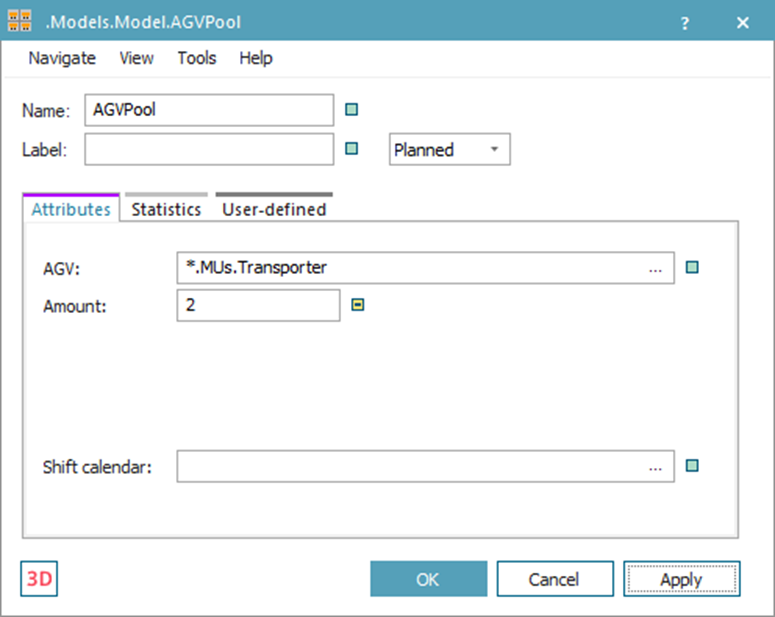
- Illesszünk be egy AGVPool objektumot az AGV-k létrehozására.
- Illesszünk be 4-4 Marker objektumot. A Transporter1 az M11, M12, M13 és M14 útvonalon, a Transporter2 pedig az M21, M22, M23 és M24 útvonalon fog közlekedni.
- Illesszünk be egy Method objektumot, ami az Init vezérlés lesz.
Az objektumok konfigurálása a következő:
- Az AGVPool objektumot alapbeállítás szerint használjuk, tehát az MUs mappában lévő Transporter objektum lesz az AGV, amiből kettőt (Amount) hozzunk létre.
A Transporter objektum alapértelmezett biztonsági zóna beállításait használjuk.
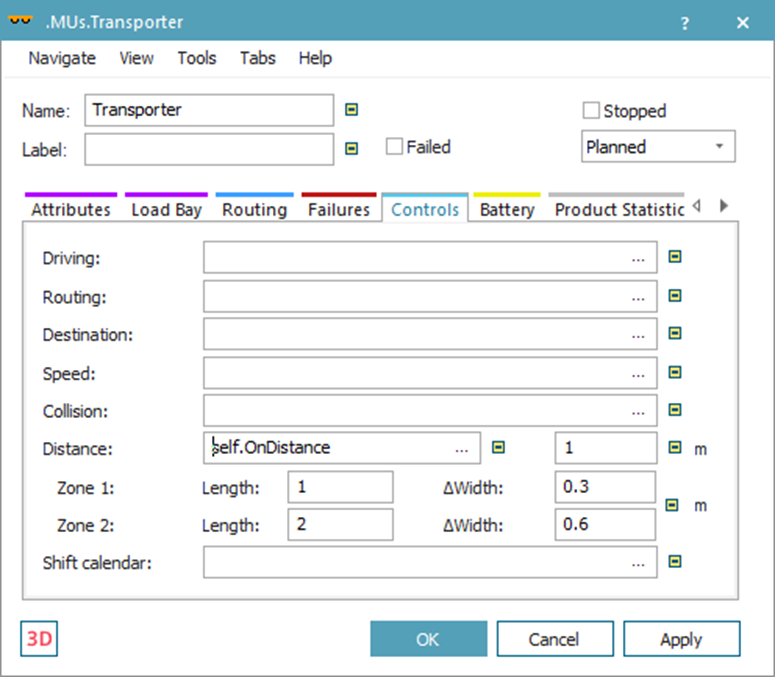
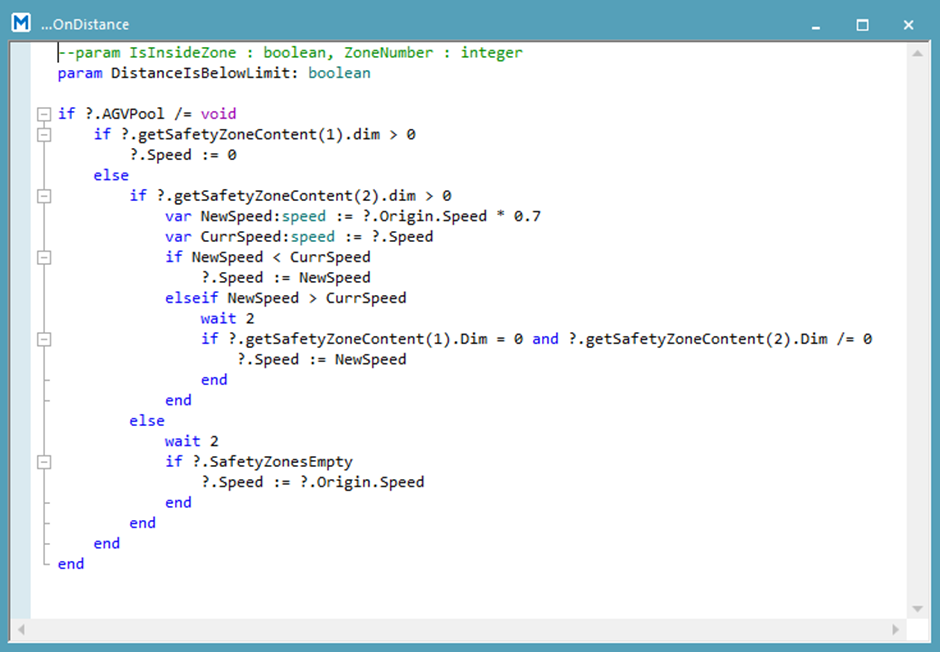
A Distance control-t létrehozva (self.OnDistance), használjuk az alábbi alapértelmezett metódust.
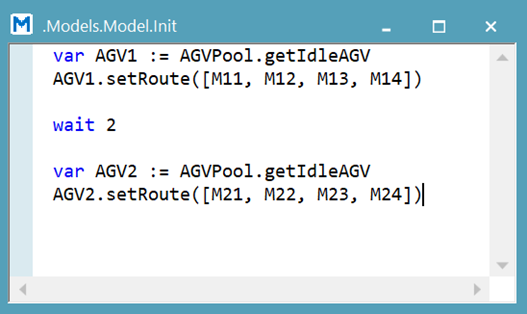
Programozzuk az Init vezérlést úgy, hogy találjon szabad AGV-ket az AGVPool-ban és állítsa be a két útvonalat egyiknek és másiknak. Mgj.: A metódusban az AGV1 a Transporter1, az AGV2 pedig a Transporter2.
A szimuláció futtatása során, megfigyelhető hogyan lassít le a Transporter2 amikor a Transporter1 belép a 2-es számú biztonsági zónájába, aztán pedig meg is áll amikor belép az 1-es számú biztonsági zónájába. Transporter2 újra elindul és folytatja útját, amikor a Transporter1 teljesen elhaladt előtte.
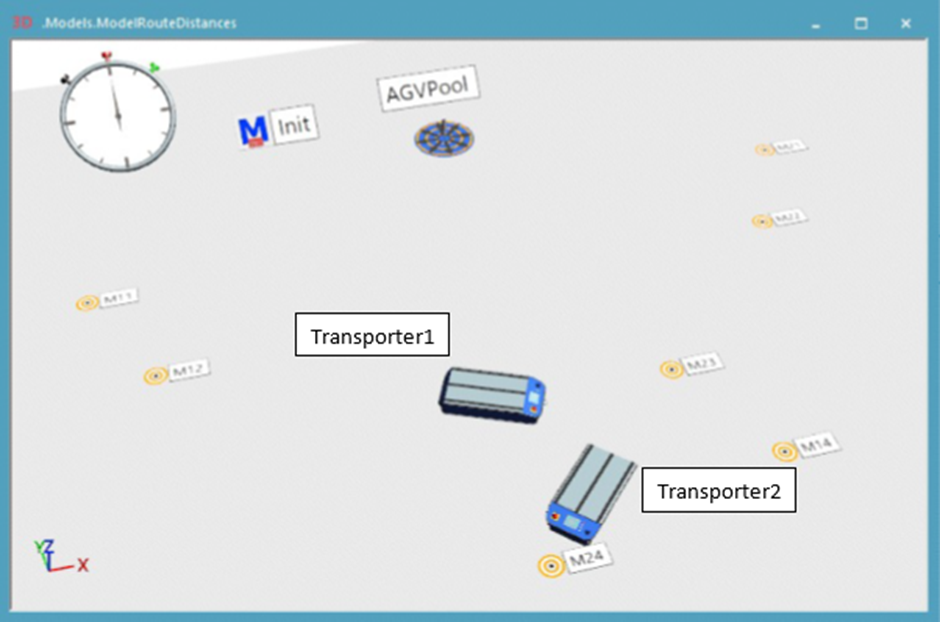
Abban az esetben, ha az M11 és M12 markereket X irányban balra toljuk, a Transporter2 fog érkezni hamarabb az útvonalak kereszteződéséhez, így a Transporter1 lassít le és várja meg amíg a Transporter2 elhalad.
A fentiek szerint elmondható, hogy a biztonsági zóna és távolságszabályozás használata alkalmas az AGV-k egymással történő ütközésének elkerülésére.
Kiegészítések
Néhány további gondolat a témában:
- Előre és hátra mozgás esetén is működik a távolság szabályozás, sőt még oldalirányban is a megfelelő biztonsági zónákkal.
- A Distance control metódus szabadon változtatható, akár komplex közelségi helyzetek kezelésére is lehetőséget adva.
- A téma folyamatosan fejlődik, amint érkezik egyéb fejlesztés, ígérjük jelentkezni fogunk.
Összefoglalásképpen, a bemutatott alkalmazás fő előnye, hogy még részletesebb AGV modellezésre van lehetőségünk, amivel realisztikusabb szimulációra és így pontosabb eredményekre tehetünk szert.





Vélemény, hozzászólás?