A Plant Simulation régóta támogatja az AGV (Automated Guided Vehicle) modellezését, amihez érdemes korábbi cikkeink között is olvasgatni: „A szabadon mozgó AGV”, „Megjelent a Plant Simulation 2201 (V17)” és „Plant Simulation 2201 (V17) újdonságok bővebben”, illetve „AGV közelség szabályozás, Plant Simulation gyakorlati példa”.
Az AGV-k főbb újdonságai közül vegyük sorra az alábbiakat:
- Legrövidebb útvonal jelölő hálózaton
- Érkezési kontroll
- Kanyar sebesség
- Virtuális flotta beüzemelése és kapcsolata a flottakezelővel
1. Legrövidebb útvonal jelölő hálózaton
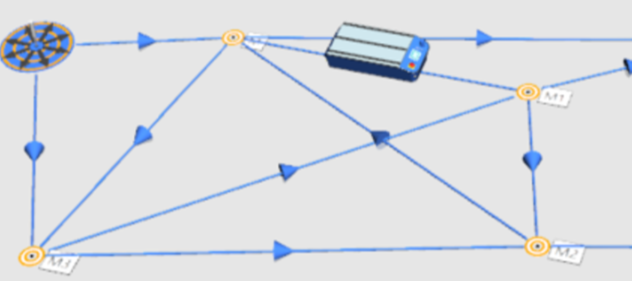
Kulcsfontosságú képességek:
- A jelölőket összekapcsolva ezentúl lehetséges az AGV hálózaton, a célhoz vezető legrövidebb útvonal automatikus meghatározása (Dijkstra féle legrövidebb útvonalkeresés).
- Egyszerűen csak a vezetési cél vagy lista használata.
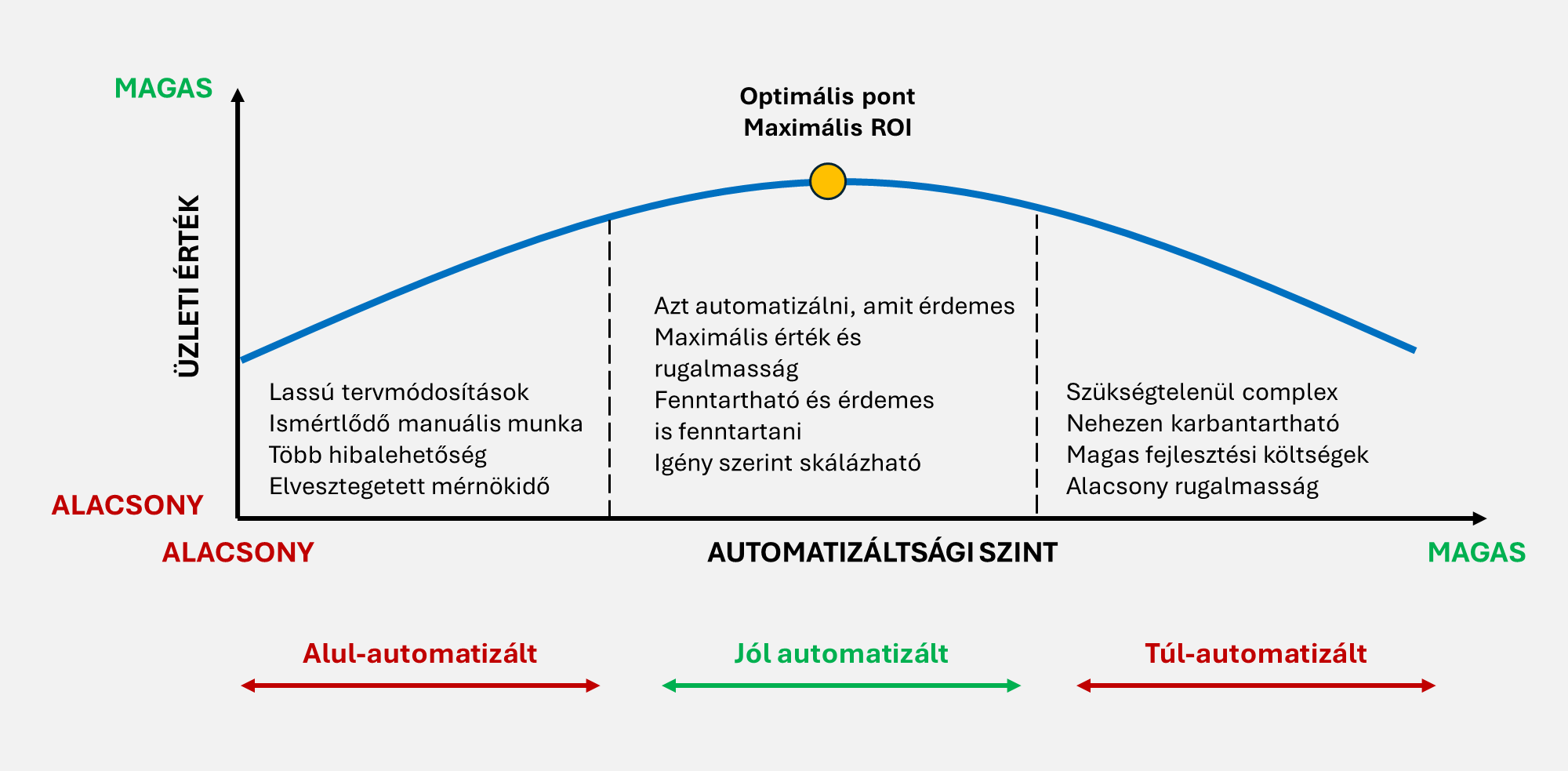
Üzleti érték:
– Megnövelt szoftver által biztosított erősségek AGV modellezés esetében.
– Azonnal elérhető eszköz számos sztenderd felhasználói esethez történő útválasztáshoz.
Vevői érték:
– Mindenkinek hasznos, aki AGV alapú logisztikát használ a modellezés során.
2. Érkezési kontroll
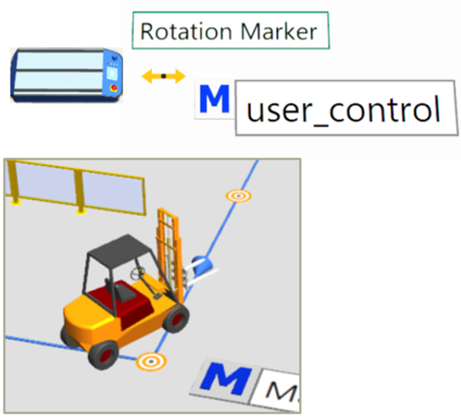
Kulcsfontosságú képességek:
- A jelölőkön lehetséges felhasználói metódust (SimTalk), egyedi tevékenységet megadni az érkezési kontroll segítségével.
- A vezérlés aktiválódik, amint az AGV megérkezik a jelölőhöz, vagy az útvonalán a legközelebb kerül hozzá.
Üzleti érték:
- Az AGV szimuláció és a virtuális beüzemelés jobb lefedettsége.
- Egyszerű visszajelzés a flottakezelőnek a jelölőkön való áthaladáskor.
Vevői érték:
- Egyszerűsített modellezés a flottakezelő szoftver szimulációs visszacsatolásához.
- Továbbfejlesztett virtuális üzembehelyezési funkcionalitás.
3. Kanyar sebesség
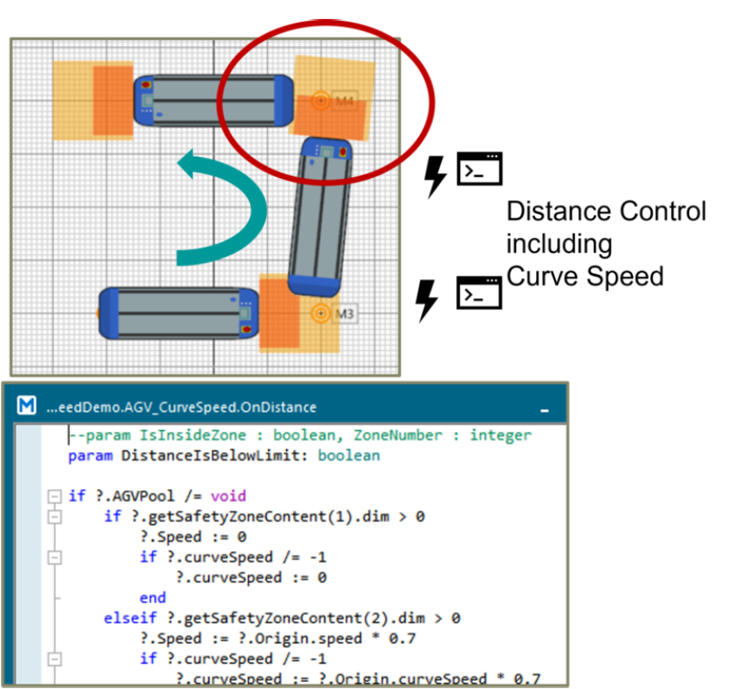
Kulcsfontosságú képességek:
- Az útvonal íves részein is szabályozható az AGV sebessége, azaz lehetőség van távolságszabályozásra csökkentett kanyarsebesség mellett, ugyanis sebességcsökkentés nélkül előfordulhat, hogy az AGV nem képes időben megállni ütközés nélkül.
- Alapértelmezett SimTalk sablon továbbfejlesztett távolságszabályozáshoz, ami már figyelembe veszi az kanyarsebesség paramétert is.
Vevői érték:
- Azonnal elérhető és paraméterezhető AGV kanyarodási viselkedés, mint ahogy az előfordul számos gyártási szituációban.
- Csökkentett erőfeszítés az egyéni SimTalk metódusok létrehozásához.
4. Virtuális flotta beüzemelése és kapcsolata a flottakezelővel
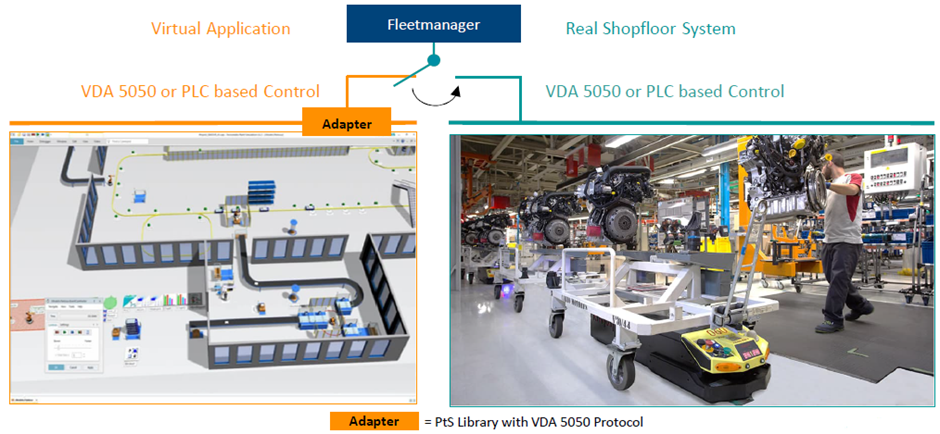
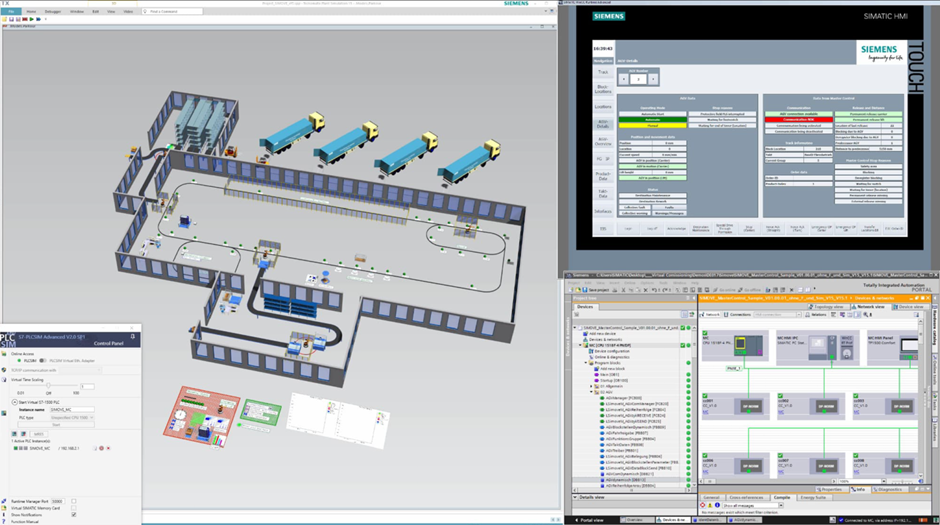
A virtuális modell, különböző szimulációs modellek kombinációja:
- Diszkrét eseményvezért szimulációs modell: anyagáramlás szimulációja (szállítószalagok, AGV-k stb.), Tecnomatix Plant Simulation.
- Kommunikáció: interfész az automatizáláshoz és a harmadik féltől származó eszközökhöz, Tecnomatix Plant Simulation Interfész csomag
- Automatizálás: PLC vezérlő program, MQTT VDA 5050 Server, PLCSIM Advanced, MQTT VDA 5050 Server*.
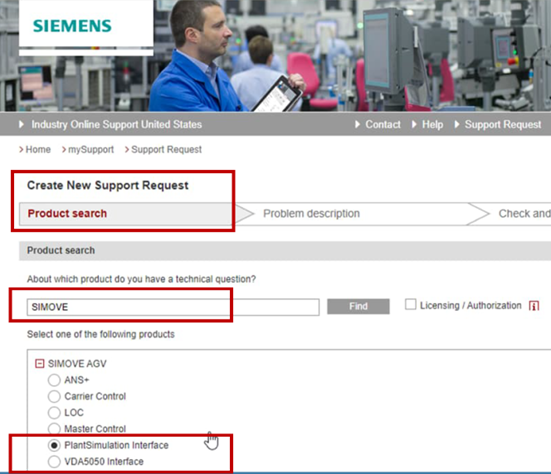
*A VDA5050 könyvtár elérhető a Siemens Industry Online Support (SIOS) felületén a Support Request, támogatási kérelem megnyitásával.
A fentiek alkalmazásával, AGV flotta virtuális beüzemelése, példaképpen a következő ábrán látható.
Összefoglalásképpen, a bemutatott újdonságok főbb előnyei, a még részletesebb AGV modellezés, illetve a továbbfejlesztett teljeskörű virtuális beüzemelés lehetősége, annak minden előnyével.


Vélemény, hozzászólás?